Cute Robot Designs and the Science of Robot Wheels
A cute robot is more than a fun shape — the way it moves matters just as much as how it looks. From a cardboard prototype to a full interstellar robot concept, mobility starts with the right wheel. Robot wheels come in dozens of types, each built for a different surface or task. Understanding the robot wheel is the first step to building anything that actually rolls where you want it to go. An omni wheel robot takes that one step further, moving in any direction without turning first.
These ideas are not just for engineers. Makers, hobbyists, and students all build rolling machines at home using off-the-shelf parts. Whether your goal is a small desktop robot or a sci-fi inspired design, the wheel system underneath is what makes or breaks the project.
How Robot Wheels Work: From Basic to Omni Wheel Robot
Types of Robot Wheel Designs
Standard robot wheels are fixed to a drive axle and rotate in one direction. They work well on flat surfaces and are easy to control. Most beginner builds use this style because the math is simple and the parts are cheap.
A robot wheel with a rubber grip works better on uneven terrain. Wider tires give more traction, while narrow ones reduce friction on smooth floors. Picking the right size and material changes how the robot handles turns and stops.
Mecanum wheels are a popular mid-level choice. Each wheel has small rollers mounted at 45-degree angles along its rim. When the motors drive the wheels in different speed combinations, the robot can slide sideways or spin in place. This is closer to the omni wheel concept but uses a different roller geometry.
Why Omni Wheel Robots Move Differently
An omni wheel robot uses wheels with rollers arranged perpendicular to the direction of travel. This lets the wheel roll forward while also sliding sideways with no extra turning. The result is full 360-degree movement from a standing position.
Three or four omni wheels placed at equal angles around a base give a robot what engineers call holonomic motion. This matters in tight spaces where a normal wheeled robot would need to reverse and re-approach. Warehouse sorting systems, hospital delivery bots, and research platforms all use this design.
The tradeoff is complexity. An omni wheel robot needs careful motor control to move in a straight line. Small errors in speed between wheels cause drift. Programming precise movement takes more effort than a simple two-wheeled drive.
Cute Robot Builds That Use Clever Wheel Systems
DIY Projects for Beginners
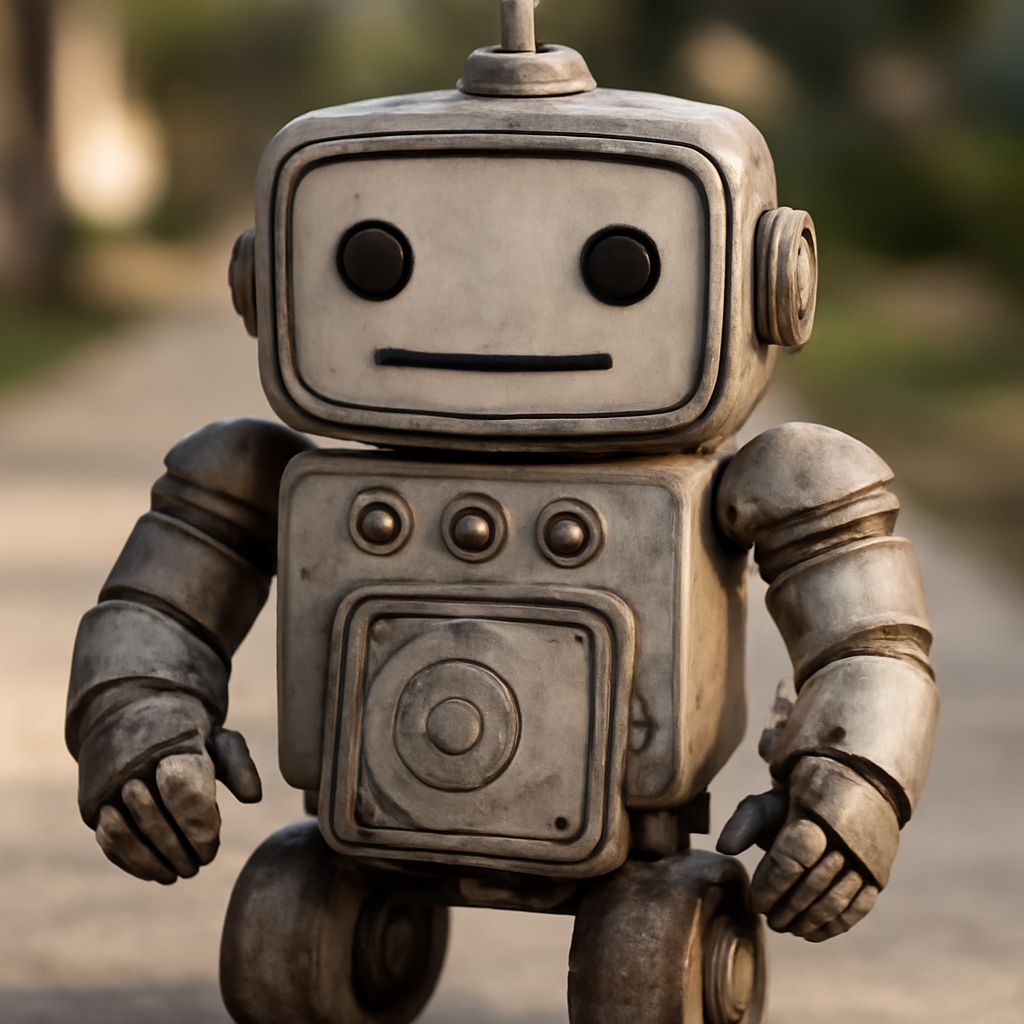
A cute robot with a round body and two standard wheels is one of the easiest builds to start with. Add googly eyes, a speaker, and a distance sensor and you have something that moves and reacts to people nearby. This type of project teaches motor control, sensor input, and basic chassis design all at once.
For kids and first-time builders, small kits with pre-drilled bases and color-coded wires make the process less intimidating. The robot wheel placement is usually fixed in these kits, which keeps the build straightforward. Once complete, the robot can follow lines or avoid walls automatically.
Slightly more advanced builds swap standard wheels for omni wheels to give the finished robot smoother rotation. A compact square base with four omni wheels lets the bot spin on the spot, which feels more alive and interactive. People who see it often assume it is far more complicated than it actually is.
When an Interstellar Robot Needs Maximum Mobility
Concept designs for an interstellar robot face a different set of challenges. A probe or rover sent across vast distances cannot afford wheel failure, so engineers test many wheel variations before committing to a design. Some interstellar robot proposals use tracks instead of wheels for redundancy, while others combine standard and omni-style rollers.
Back on Earth, researchers study how wheels perform on sand, gravel, and loose rock to simulate what a distant rover might encounter. The robot wheel research done in labs today feeds directly into future space mission hardware. Even a cute robot designed for a classroom demo might carry concepts tested on much larger platforms.
Whether the goal is a playful desktop bot or a serious mobility study, the wheel is what keeps everything moving. Choose the right type for your surface, match the motor torque to the weight, and test on the actual terrain before finalizing the build. That process applies to a simple cute robot and scales up to the most advanced omni wheel robot ever designed.